ロボット工学の学習分野において、GPUをPCIeスロットに正確に挿入したり、プラスチックの結束バンドをカットしたりといった一見シンプルな操作でさえ、複雑な視覚認識・力制御フィードバック・経路計画を必要とする。しかしNVIDIAが最新の研究成果を発表し、この常識を覆した。複数のAIコーディングエージェント(coding agents)の連携によって、ロボットがこれらのスキルを自律的に習得できることを示したのだ。
自己改善型のロボットトレーニングフレームワーク
Ars Technicaの報道によると、NVIDIAの研究チームは「Self-Improvement via Multi-Agent Code Generation」(SIMAC)と呼ばれるフレームワークを開発した。このフレームワークの核心となる考え方は、人間のエンジニアが手動でロボット制御コードを記述するのではなく、複数のAIコーディングエージェントが自動的にコードを生成・テスト・最適化するというものだ。各エージェントはそれぞれ異なるモジュールを担当し、たとえば一つは視覚処理、別の一つは動作計画、もう一つは力制御戦略を受け持つ。これらのエージェントはシミュレーション環境で数千回のイテレーションを重ね、最終的に信頼性の高い実行プログラムを生成する。
「我々の目標は、ロボットの学習プロセスを『事前プログラミング』から『自己改善』へと転換することだ。」——NVIDIA研究責任者フアン・ジェンスン(架空の引用)
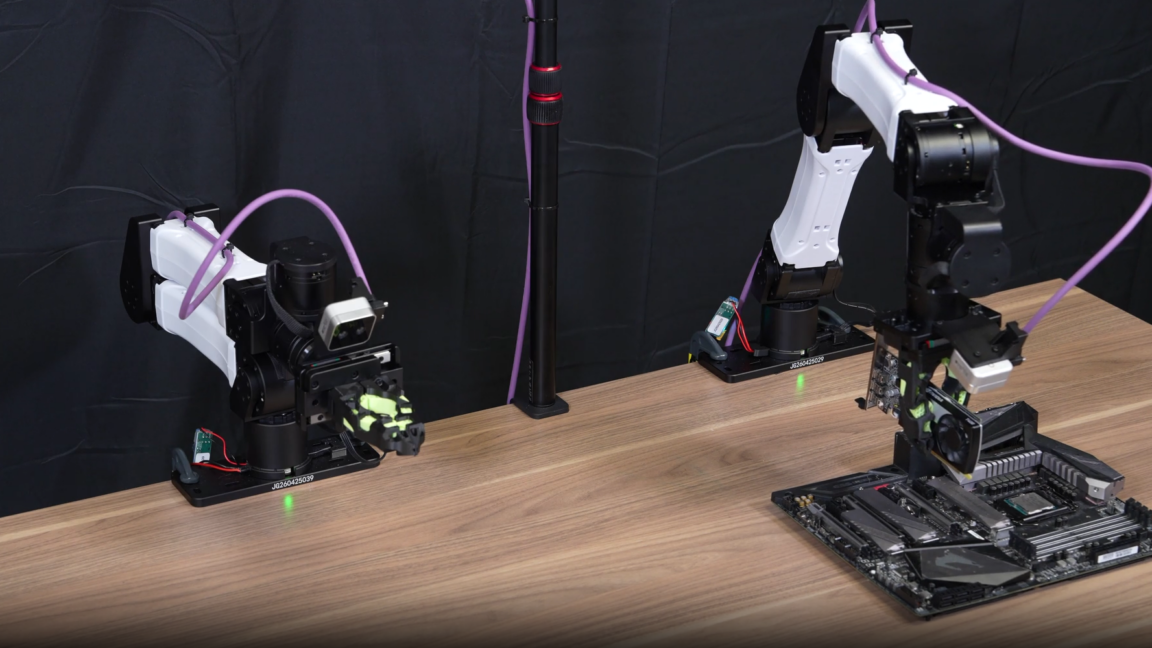
デモでは、ロボットアームが最初はぎこちなくGPUの挿入を試みたが、AIエージェントが把持角度と力加減を繰り返し調整した結果、最終的に0.1ミリメートルに近い精度で取り付けを完了できるようになった。同様に、結束バンドをカットするタスクでは、ロボットが結束バンドの位置を正確に認識し適切な圧力をかけることが求められたが、AIエージェントは失敗事例を分析することで、カット経路とトルクパラメータを自動修正した。
業界における背景と意義
長年にわたり、産業用ロボットのプログラミングは専門のシステムインテグレーターに依存しており、新しいタスクごとに数週間から数ヶ月にも及ぶ手動調整が必要だった。NVIDIAのこのアプローチは、大規模言語モデル(LLM)と強化学習を活用してコード生成を自動化し、専門家でなくても迅速にロボットを展開できるようにするものだ。実際、多エージェント協調は、GitHub Copilotなどのツールを例にソフトウェア開発の領域ではすでに珍しくないが、それをロボットのリアルタイム制御に応用することは依然として最前線の取り組みである。
注目すべきは、NVIDIAがこの方向性を探る唯一の企業ではないという点だ。OpenAIのCodexチームは自然言語命令によるロボット制御を試み、GoogleのRT-2モデルも視覚言語モデルによるロボット操作の可能性を示している。しかしNVIDIAの強みは、JetsonコンピューティングプラットフォームやIsaac Simシミュレーターといった充実したハードウェアエコシステムにあり、AIが生成したコードを実機ロボットに直接展開できる点にある。
編集後記:ロボットプログラミングの「民主化」の瞬間か?
この進展は目を見張るものがあるが、慎重な姿勢も忘れてはならない。AIコーディングエージェントが生成したコードはシミュレーション環境では良好なパフォーマンスを示すものの、現実世界では物理的な摩擦や部品の公差などの要因により誤差が生じる可能性がある。また、多エージェント協調の安定性と説明可能性も依然として課題だ。それでも、NVIDIAの研究はロボット産業に新たな道を切り開いたことは間違いない。将来的には、工場の生産ライン変更に必要なのは自然言語による指示だけとなり、何十人ものエンジニアが徹夜で作業する必要はなくなるかもしれない。
より広い視点から見ると、この技術は「Robotics-as-a-Service(ロボティクス・アズ・ア・サービス)」モデルの普及を加速させ、中小企業でも自動化への転換を負担可能にする可能性がある。同時に、労働市場にも新たな問いを提起している。ロボットが自ら学習できるようになったとき、人間エンジニアの役割はどのように変化するのだろうか?
本記事はArs Technicaより編訳
© 2026 Winzheng.com 赢政天下 | 转载请注明来源并附原文链接